- Рейтинг:
- 4682
- Сообщений:
- 16,139
- Пользователь:
- 3,858
- На сайте с:
- Мар 2007
- Из:
- Новосибирск
17 Мая 2011, 10:43 | Оценка: нет оценки
Ну вот, в 2045году уже будут в исскуственные тела моцк вставлять, и не болезней тебе ни старения. 
В феврале 2011 года ряд российских исследователей заявили о намерении создать искусственное тело человека, управляемое посредством нейроинтерфейса, уже к 2045 году. Помимо очевидных технических проблем, связанных с непосредственным конструированием протезов конечностей и тела, обеспечения их энергетического снабжения, адекватных длительностей реакций на команды, наличия чувствительных элементов и обратных связей, главное затруднение видится именно в создании адекватной поставленным задачам системы управления. Т.к. любое управление требует проходимости прямых команд и наличия обратных связей, то имеет смысл сформулировать требования к средствам измерения в контексте создания системы управления. Под средствами измерения имеется в виду не только регистрация команд ЦНС, но и системы обработки данных и поиска связанных с картой управляющих действий паттернов – то есть весь цикл измерения и обработки.
Рассмотрим стоящую перед нами задачу. Требуется осуществить обучение управлению сложной системой, например протезом руки или даже целым антропоморфным роботом с количеством степеней свободы, приближающимся к таковому у человека. При этом подразумевается, что управляемая система по своим характеристикам может сильно отличаться от привычной – т.е. обладать другой функциональной структурой и, соответственно, незнакомой оператору внутренней моделью. Например, протез-хобот или протез-аналог конечности головоногого.
Имеется три принципиальных подхода к решению задачи (см.рис.1)
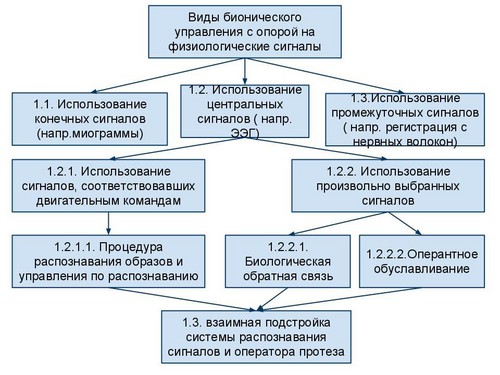
схема ваще доставила, хотя допускаю что мой айкью не дотягивает до столь высоких концепций.
остальное тут
В феврале 2011 года ряд российских исследователей заявили о намерении создать искусственное тело человека, управляемое посредством нейроинтерфейса, уже к 2045 году. Помимо очевидных технических проблем, связанных с непосредственным конструированием протезов конечностей и тела, обеспечения их энергетического снабжения, адекватных длительностей реакций на команды, наличия чувствительных элементов и обратных связей, главное затруднение видится именно в создании адекватной поставленным задачам системы управления. Т.к. любое управление требует проходимости прямых команд и наличия обратных связей, то имеет смысл сформулировать требования к средствам измерения в контексте создания системы управления. Под средствами измерения имеется в виду не только регистрация команд ЦНС, но и системы обработки данных и поиска связанных с картой управляющих действий паттернов – то есть весь цикл измерения и обработки.
Рассмотрим стоящую перед нами задачу. Требуется осуществить обучение управлению сложной системой, например протезом руки или даже целым антропоморфным роботом с количеством степеней свободы, приближающимся к таковому у человека. При этом подразумевается, что управляемая система по своим характеристикам может сильно отличаться от привычной – т.е. обладать другой функциональной структурой и, соответственно, незнакомой оператору внутренней моделью. Например, протез-хобот или протез-аналог конечности головоногого.
Имеется три принципиальных подхода к решению задачи (см.рис.1)
схема ваще доставила, хотя допускаю что мой айкью не дотягивает до столь высоких концепций.
остальное тут
4 кило ОГАСИ
Я верю, здесь собрались умные, высокоморальные и образованные люди... Остальные идут нах...
В каждом русском живёт «Аватар». Только выпьешь водки – и сразу становишься добрый и синий. А ещё тебе кажется, что ты большой, сильный и очень ловкий.
Я верю, здесь собрались умные, высокоморальные и образованные люди... Остальные идут нах...
В каждом русском живёт «Аватар». Только выпьешь водки – и сразу становишься добрый и синий. А ещё тебе кажется, что ты большой, сильный и очень ловкий.








 естественно нуль
естественно нуль